Robocup @ HSRT
Hochschule Reutlingen, RT Lions
RoboCup Open Platform League: Object Detection & Recognition
Competitions @ Magdeburg, Germany | Nagoya, Japan

Implementation description:
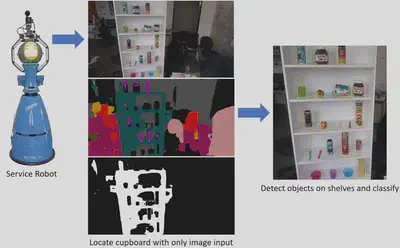
Using only an image input from the camera mounted on our service robot, an object detection and recognition pipeline is built to locate objects on the cupboard and table. The object classification model is trained using MATLAB. During the competition, unknown objects are also included. Thus, using a simple similarity measure (Euclidean distance) with the extracted image features, the unknown objects are grouped with the known object classes.